

汎用3軸ロボットREX200 メインページ
1軸直交ロボット、3軸直交ロボット (X-Y-Z軸) を低価格で販売致します。
最大有効ストローク 50mm~570mm 見積もり致します。
用途:試薬注入、防振ゴム対応オイル注入、接着剤塗布など、0.1~99.9秒の制御ができます。
特徴
この度、開発を行なったロボットは、低価格でありながら使い易く、高機能と高精度を実現した製品です。
このロボットは、プログラムの作成をパソコンのEXCELに任せ、データをUSBを経由してロボット・コントローラのメモリー
に保管して、その後パソコンなしで駆動させます。
EXCELで操作する、ジョグモードを搭載しているので簡単に位置決めデータが得られ、外部出力も駆動できるのでチャックなどの
動作確認ができます。
パレタイズ機能を搭載しているので僅かなステップ数のプログラムで大規模な動作プログラムを簡単に作成できます。
ループ・カウンタ機能を搭載しているので自動停止できます。
外部入力と外部出力を装備しているので、他の機械とのリンクが容易です。
万に一つを考慮して位置ずれ防止機能を備えてあります。
用途は、半導体製造装置、汎用自動機として、ワークの移動、位置決め、穴あけ、線引き(直線のみ可能), 各種測定の自動化。
REX200 (ストローク200mm)
ロボットの寸法 長さ470 幅125 高さ65 突起部分を除く (参考 REX200 有効ストローク200mm)
REX-XYZ ロボット・コントローラー


表面写真 背面写真
コントローラーの寸法 幅=400 高さ=55 奥行=250 突起部を除く
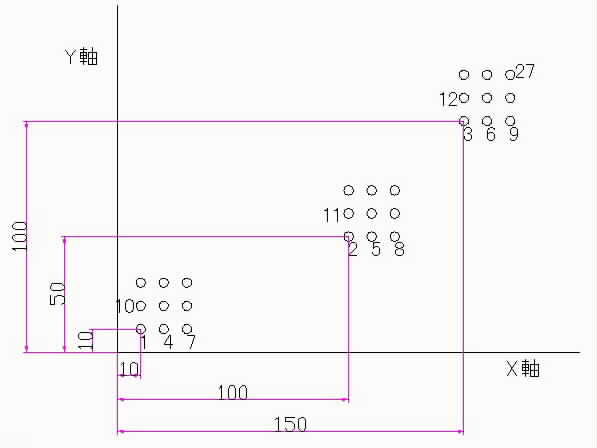
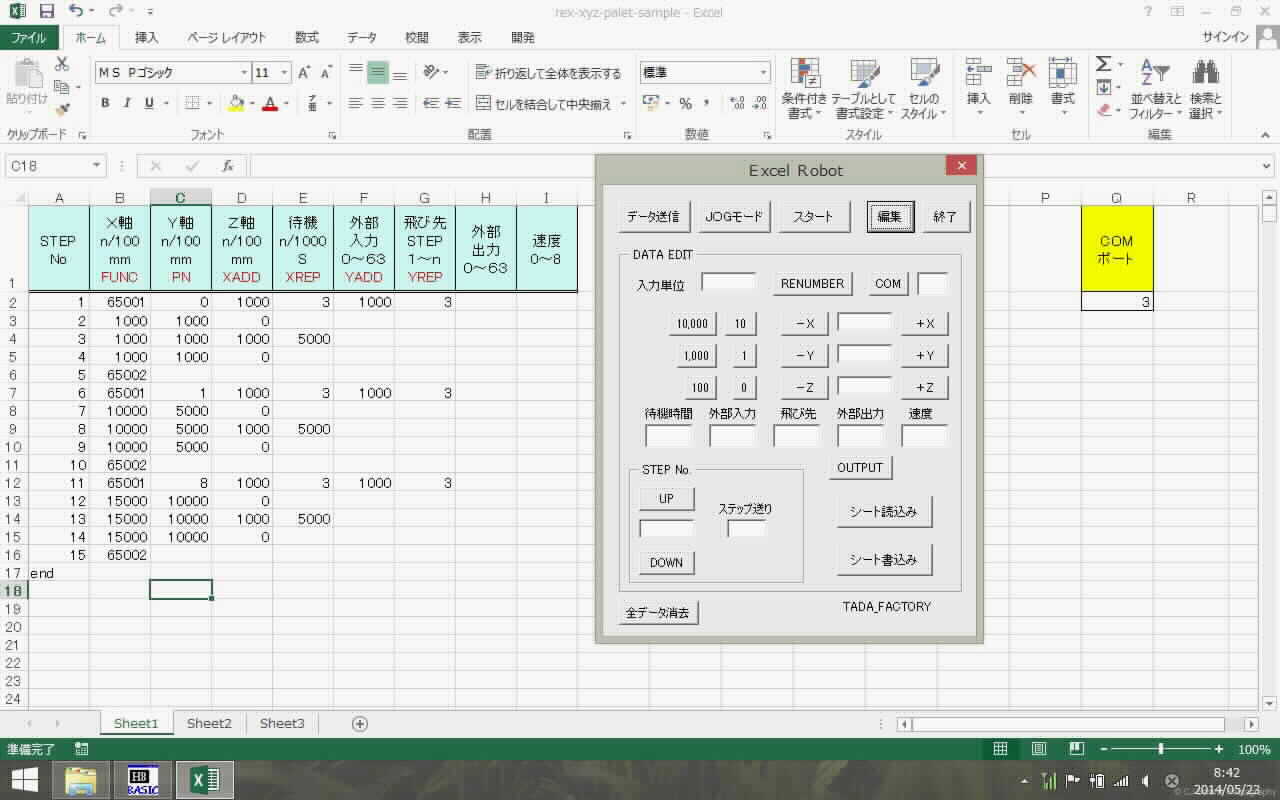
| EXCEL2013を用いた3軸ロボットで3個のパレットを用いたサンプルです。 パレタイズ機能はX,Yで多数の等分の移動プログラムを簡単に作成できます。 パレタイズは65001で始まり65002で終ります。 パレットはPN, パレットナンバーで0~8の9個まで使用できます。 65001でパレット機能の開始、Xの加算値、Xの繰り返し数、Yの加算値、Yの繰り返し数 サンプルのプログラムでは、右図X-Y座標の1~27の順に移動し、各座標に於いてZ軸が下降、上昇を行い、1の位置から繰り返す動きになります。 |
 |
動作環境
Windows8.1 Excel2013
Windows7 Excel2013
ロボット本体
有効ストローク 50mm から ストローク570mmまで
寸法 ストローク200mmの場合 長さ470 幅125 高さ65 突起部分を除く
重量 ストローク200mmの場合 1軸当たり 6.5Kg
積載搬送重量 50Kg程度
推進力 100Kgf以上
送り精度 0.01mm
繰り返し精度 ±5μ以内
駆動 パルスモーター、転造ボールねじ
オーバーラン センサー 2個 (フロント方向、リバース方向)
原点センサー 2個 (粗原点検出、精密原点検出)
コントローラ
寸法 幅=400 高さ=55 奥行=250 突起部を除く
重量 2.5Kg
電源 AC100V 50-60Hz
加速減速自動
二相ステッピングモータ ハーフステップ駆動
最大65、000パルス(モータ162.5回転)
外部インターフェイス
外部入力 0 から 63 の6ビット制御
外部出力 0 から 63 の6ビット制御
出力6ビット DC24V以下 100mmA 以下のオープンコレクタ
入力待機 0.1秒刻みで0から99.9秒
入力、条件ジャンプ 指定ビット入力があると指定ステップに飛ぶ
駆動スピード 0から8
LCD表示内容
20文字×4ライン
ステップ・ナンバー X軸 Y軸 Z軸 待機時間 外部入力情報 飛び先 外部出力情報 スピード ループ・カウンター
各ステップデータと外部入力情報をステップ毎に表示
原点復帰 オーバーラン JOGデータ
プログラム・ステップ数
最大285ステップ データ保存期限1ヶ月程度
ループ・カウンター機能
指定したループ回数を越えると自動停止させることができます。
制御ソフト
EXCEL VBA によるビジュアルソフト
PTP制御
プログラム入力方法
EXCEL WORK SHEET に直接タイプイン
VBAマクロのFORMからジョグモードでデータ入力
REX200
直交ロボット本体 (有効ストローク 200mm リード4mm)
モーターケーブル 1.3m 1本
センサーケーブル 1.3m 1本
REX-XYZ
3軸コントローラ (3軸対応EXCEL用制御ソフト付き)
USBケーブル 1m 1本
電源ケーブル 2m 1本
改良の為、外観を含み仕様を変更する場合があります。
無断での画像、文章の使用、転載を固くお断り致します。